I’ve done a lot of experiments with latent diffusion and also discovered a few flaws in the SD VAE’s training and architecture, which have hardly no attention brought to them. This is concerning as the VAE is a crucial competent when it comes to image quality and is responsible for many of the artefacts associated with AI generated imagery, and no amount of training the diffusion model will fix them.
A few I’ve seen are:
- The goal should be to have latent outputs as closely resemble gaussian distributed terms between -1 and 1 with a variance of 1, but the outputs are unbounded (you could easily clamp or apply tanh to force them to be between -1 and 1), and the KL loss weight is too low, hence why the latents are weighed by a magic number to more closely fit the -1 to 1 range before being invested by the diffusion model.
- To decrease the computational load of the diffusion model, you should reduce the spatial dimensions of the input - having a low number of channels is irrelevant. The SD VAE turns each 8x8x3 block into a 1x1x4 block when it could be turning it into a 1x1x8 (or even higher) block and preserve much more detail at basically 0 computational cost, since the first operation the diffusion model does is apply a convolution to greatly increase the number of channels.
- The discriminator is based on a tiny PatchGAN, which is an ancient model by modern standards. You can have much better results by applying some of the GAN research of the last few years, or of course using a diffusion decoder which is then distilled either with consistency or adversarial distillation.
- KL divergence in general is not even the most optimal way to achieve the goals of a latent diffusion model’s VAE, which is to decrease the spatial dimensions of the input images and have a latent space that’s robust to noise and local perturbations. I’ve had better results with a vanilla AE, clamping the outputs, having a variance loss term and applying various perturbations to the latents before they are ingested by the decoder.
Yes: from TFA, SD XL released some months ago uses a new VAE.
n.b. clarifying because most of the top comments currently are recommending this person is hired / inquiring if anyones begun work to leverage their insights: they're discussing known issues in a 2 year old model as if it was newly discovered issues in a recent model. (TFA points this out as well)
The SD-XL VAE doesn’t take into account any of those insights, it’s the exact same as the SD1/2 one, just trained from scratch with a batch size of 256 instead of 9 and with EMA.
> To this end, we train the same autoencoder architecture used for the original Stable Diffusion at a larger batch-size (256 vs 9) and additionally track the weights with an exponential moving average. The resulting autoencoder outperforms the original model in all evaluated reconstruction metrics
And if you look at the SD-XL VAE config file, it has a scaling factor of 0.13025 while the original SD VAE had one of 0.18215 - so meaning it was also trained with an unbounded output. The architecture is also the exact same if you inspect the model file.
But if you have any details about the training procedure of the new VAE that they didn’t include in the paper, feel free to link to them, I’d love to take a look.
c.f. https://news.ycombinator.com/item?id=39220027, or TFA*. They're doing a gish gallop, and I can't really justify burning more karma to poke holes in a stranger's
overly erudite tales. I swing about 8 points to the negative when they reply with more.
* multiple sources including OP:
"The SDXL VAE of the same architecture doesn't have this problem,"
"If future models using KL autoencoders do not use the pretrained CompVis checkpoints and use one like SDXL's that is trained properly, they'll be fine."
"SDXL is not subject to this issue because it has its own VAE, which as far as I can tell is trained correctly and does not exhibit the same issues."
I think you must have misunderstood me, I didn’t say the SD-XL VAE had the same issue as in OP. What I said was that it didn’t take into account some of my points that came up during my research:
- Bounding the outputs to -1, 1 and optimising the variance directly to make it approach 1
- Increasing the number of channels to 8, as the spatial resolution reduction is most important for latent diffusion
- Using a more modern discriminator architecture instead of PatchGAN’s
- Using a vanilla AE with various perturbations instead of KL divergence
Now SD-XL’s VAE is very good and superior to its predecessor, on account of an improved training procedure, but it didn’t use any of the above tricks. It may even be the case that they would have made no difference in the end - they were useful to me in the context of training models with limited compute.
I would assume there is not much attention because better results come from just dropping the VAE entirely unless you're chasing a small resource bound, but most of the research interest is in state of the art work which is hardly resources bounded.
All your points are good ones and were knowable by any researcher at the time who wasn’t, idk, a new grad or new to CV. I always assumed they just threw the VAE in there using the default
options from the original VAE paper and never thought about it much again, or never looked into it due to the training cost (for hyperparam search, mainly). I don’t remember most of the points you raised being common knowledge when the VAE paper came out, but they certainly were when the stable diffusion paper came out.
> All your points are good ones and were knowable by any researcher at the time who wasn’t, idk, a new grad or new to CV.
I think you are radically overstating how obvious some of these things are.
What you call "just threw the VAE in there using the default options from the original VAE paper" is what another person might call "used a proven reference implementation, with the settings recommended by its creator"
Sure, there are design flaws with SD1.0 which feel obvious today - they've published SDXL and having read the paper, I wouldn't even consider going about such a project without "Conditioning the Model on Cropping Parameters". But the truth is this stuff is only obvious to me because someone else figured it out and told me.
I’m not criticizing them or the approach. That’s what I would have done most likely. But the things you mentioned aren’t particular to stable diffusion, or even VAEs. Yes, the best way to learn is to be told or to build up applied/implemen6ation experience until you learn them directly. But almost any CV model will run into at least one of those issues, and I would expect someone with idk > 1y experience in applied work to know these things. Perhaps I am wrong to do that.
Everything you've said is _intuitively_ correct, but empirically wrong. I've experimented with training VAEs for audio diffusion for the last few months and here's what I found:
- Although the best results for a stand-alone VAE might require increasing the KL loss weight as high as you can to reach an isotropic gaussian latent space without compromising reconstruction quality, beyond a certain point this actually substantially decreases the ability of the diffusion model to properly interpret the latent space and degrades generation quality. The motivation behind constraining the KL loss weight is to ensure the VAE only provides _perceptual_ compression, which VAEs are quite good at, not _semantic_ compression, for which VAEs are a poor generative model compared to diffusion. This is explained in the original latent diffusion paper on which Stable Diffusion was based: https://arxiv.org/pdf/2112.10752.pdf
- You're correct that trading dimensions for channels is a very easy way to increase reconstruction quality of a stand-alone VAE, but it is a very poor choice when the latents are going into a diffusion model. This again makes the latent space harder for the diffusion model to interpret, and again isn't needed if the VAE is strictly operating in the perceptual compression regime as opposed to the semantic compression regime. The underlying reason is channel-wise degrees of freedom have no inherent structure imposed by the underlying convolutional network; in the limit where you hypothetically compress dimensions to a single point with a large number of channels the latent space is completely unstructured and the entropy of the latents is fully maximized; there are no patterns left whatsoever for the diffusion model to work with.
TLDR: Designing VAEs for latent diffusion has a different set of design constraints than designing a VAE as a stand-alone generative model.
These are very fine ways of explaining simple things in an ego-boosting manner. The more you work with ML these days the more you appreciate it. It happens with every new technology bubble.
In regular terms he's saying the outputs aren't coming out in the same dimensions that the next stages cn work with properly. It wants values between -1 and +1 and it isn't guaranteeing it. Then he's saying you can make it quicker to process by putting the data into a more compact structure for the next stage.
The discriminator could be improved. i.e we could capture better input
KL Diversion is not an accurate tool for manipulating the data, and we have better.
ML is a huge pot of turning regular computer science and maths into intelligible papers. If you'd like assurance, look up something like MinMax functions and Sigmoids. You've likely worked with these since you progressed from HelloWorld.cpp but wouldn't care to shout about them in public
Only took a quick glance. But it looks like a good debunking to me, especially the part where he refers to a section of the original paper clearly stating that the VAE has been trained with a 10e-6 weight factor on the KL divergence term.
I think what would happen if this problem was fixed is that the VAE would produce less appealing more blurry images. This is a classic problem with VAEs. So, more mathematically correct, but less visually appealing.
Not necessarily if the model is trained with an appropriate adversarial loss. The reason that VAEs are blurry isn’t directly because of the KL divergence loss term but because of the L1/L2 loss. Since VAEs sample from a Gaussian distribution, a high KL weight will make the latent of different images overlap (towards a -1 to 1.0 with a variance of 1 and a mean of 0), and the output of the decoder will tend towards the mean of possible values to try and minimise the pixel-wise loss.
With the appropriate GAN loss, you will instead get a plausible sharp image that differs more and more from the original the more you weigh the KL loss term. A classic GAN that samples from the normal distribution in fact has the best possible KL divergence loss and none of the blurriness from a VAE’s pixel based loss.
This is one of the cool things about various neural network architectures that I've found in my own work: you can make a lot of dumb mistakes in coding certain aspects but because the model has so many degrees of freedom it can actually "learn away" your mistakes.
It's also one of the scariest things about NNs. Traditionally, if you had a bug that was causing serious performance or quality issues, it was a safe bet that you'd eventually discover it and fix it. It would fail one test or another, crash the program, or otherwise come up short against the expectations you'd have for a working implementation. Now it's almost impossible to know if what you've implemented is really performing at its best.
IMO the ability for a NN to compensate for bugs and unfounded assumptions in the model isn't a Good Thing in the slightest. Building latent-space diagnostics that can determine whether a network is wasting time working around bugs sounds like a worthwhile research topic in itself (and probably already is.)
It is a good thing for deep NNs to be expressive enough to do this, because it is this level of expressivity that let's it find answers to otherwise ill-posed problems. If it were not able to do this there would be no point in using them.
The only thing that is scary is the hype, because this will make people sloppily use deep learning architectures for problems that do not need that level of expressive power, and because deep learning is challenging and not theoretically well understood, there will be little to no attempts made to ensure safe operation/quality assurance of the implemented solution.
It's a common problem for network protocols, IO subsystems, etc. and really even any software with error handling.
It's been a few years since I worked on any program using boost asio, but at least back then if you straced it you'd find it constantly attempting to malloc hundreds of TB of ram, failing harmlessly, then continuing on with its life. (bet that will be fun when someone tries to run it on a system that supports that much virtual address space)
Similarly anything with any kind of feedback correction. PID controllers, codecs that code residuals-- you can get things horribly wrong and the later steps will paper it over.
Taking a step back you can even say that common software development practices-- a kind of meta program-- have the issue: A drunk squirrel sends you a patch full of errors, your test suite flags some which you fix. Then you ship all the bugs you didn't catch, because the test suite caused you to fix some issues but didn't change the fact that you were accepting code from a dubious source.
So I would say that the ML world is only special in that they exist almost entirely of self-correcting mechanisms and that inconsistent performance is broadly expected to a vastly greater degree, so when errors leak through you still may not react. If a calculator app told you that 2+2=5 you'd immediately be sure that something is actually broken, while if some LLM does it, it could just be an expected limitation (or even just sampling bad luck).
Another example is when people realized that SD v1.5 wasn't able to generate images that were too dark or too bright. The problem in the end was that during training even the noisiest step still has enough signal for the model to be able to detect the mean of the actual image (signal), this is done because you cannot have pure Gaussian noise during training of an epsilon objective model or it will cause a division by zero. Of course during inference there is no signal in the first step, so the model would read the mean of the input (so zero as the input is Gaussian noise) and it will output an image of mean 0.
It's not uncommon to find major problems with these systems, I remember inspecting the VQGAN used by Dalle Mega (the largest version of Dalle Mini) and discovering that the vast majority of entries in the codebook had a magnitude very close to zero, making them completely unusable by the model.
> and I would also like to thank the Glaze Team, because I accidentally discovered this while analyzing latent images perturbed by Nightshade and wouldn't have found it without them, because I guess nobody else ever had a reason to inspect the log variance of the latent distributions created by the VAE
> It's a spot where the VAE is trying to smuggle global information about the image through latent space. This is exactly the problem that KL-divergence loss is supposed to prevent.
Is that what KL divergence does?
I thought it was supposed to (when combined with reconstruction loss) “smooth” the latent space out so that you could interpolate over it.
Doesn’t increasing the weight of the KL term just result in random output in the latent; eg. What you get if you opt purely for KL divergence?
I honestly have no idea at all what the OP has found or what it means, but it doesnt seem that surprising that modifying the latent results in global changes in the output.
Is manually editing latents a thing?
Surely you would interpolate from another latent…? And if the result is chaos, you dont have well clustered latents? (Which is what happens from too much KL, not too little right?)
I'd feel a lot more 'across' this if the OP had demonstrated it on a trivial MNIST vae with both the issue, the result and quantitatively what fixing it does.
I can't comment on what changing the weights of the KL divergence does in this context, but generally
> Is that what KL divergence does?
KL divergence is basically a distance "metric" in the space of probability distributions. If you have two probability distributions A and B, you can ask how similar they are. "Metric" is in scare quotes because you can't actually get a distance function in the usual sense. For example, dist(A,B) != dist(B,A).
If you think about the distribution as giving information about things, then the distance function should say two things are close if they provide similar information and are distant if one provides more information about something than the other.
The comment claims (and I assume they know what they're talking about) that after training we want the KL divergence to be close to a standard Gaussian. So that would mean that our statistical distribution gives roughly the same information as a standard Gaussian. It sounds like this distribution has a whole lot of information in one heavily localized area though (or maybe too little information in that area, I'm not sure which way it goes).
Almost. The KL tells you how much additional information/entropy you get from a random sample of your distribution versus the target distribution.
Here, the target distribution is defined as the unit gaussian and this is defined as the point of zero information (the prior). The KL between the output of the encoder and the prior is telling us how much information can flow from the encoder to the decoder. You don't want the KL to be zero, but usually fairly close to zero.
You can think of the KL as the number of bits you would like to compress your image into.
MMmm... Is there any specific reason this would result in a 1-1 mapping between the latent and the decoded image? Wouldn't just be a random distribution and everything out of the VAE would just be pure chaos?
Unfortunately I don't know this field yet. User 317070 may have more context here. They commented here [0] about how to think about the KL divergence as measuring information from from the encoder to the decoder and what we want out of that.
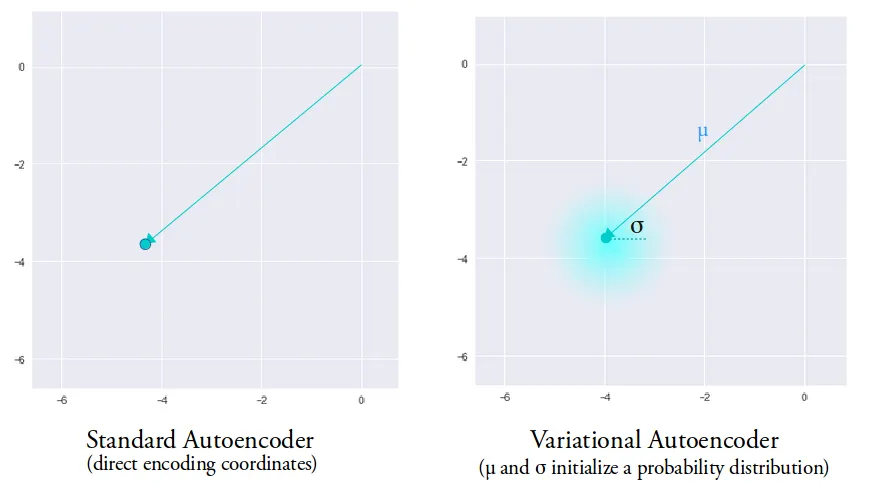
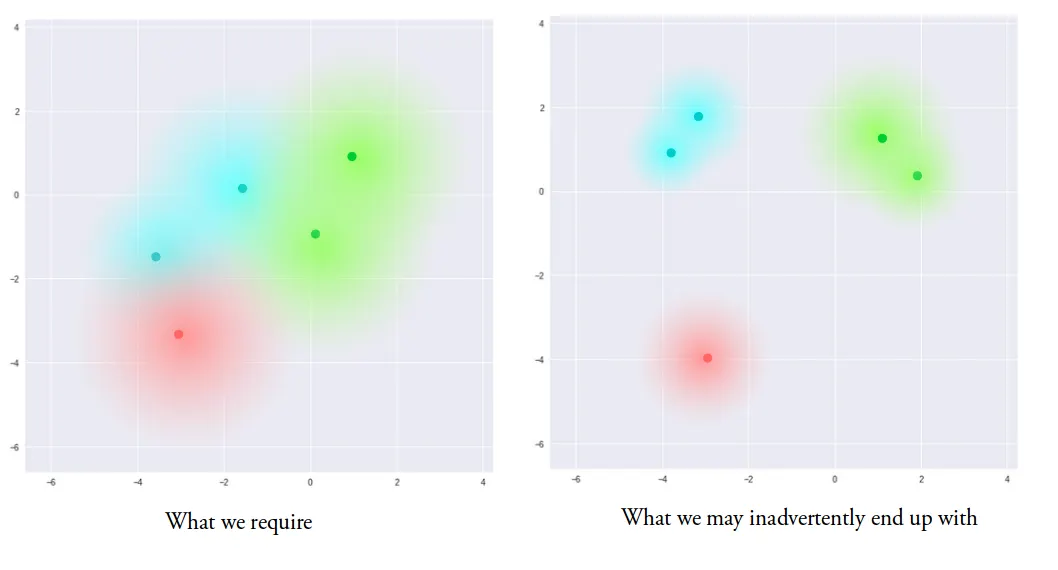
But based on the link you sent, it looks like what we're doing is creating multiple distributions each of which we want patterned on the standard normal. The key diagrams are
https://miro.medium.com/v2/resize:fit:1400/format:webp/1*96h... and https://miro.medium.com/v2/resize:fit:1400/format:webp/1*xCj.... You want the little clouds around each dot to be roughly the same shape. Intuitively, it seems like we want to add noise in various places, and we want that noise to be Gaussian noise. So to achieve that we measure the "distance" of each of these distributions from the standard Gaussian using KL divergence.
To me, it seems like one way to look at this is that the KL divergence is essentially a penalty term and it's the reconstruction loss we really want to optimize. The KL penalty term is there to serve essentially as a model of smoothness so that we don't veer too far away from continuity.
This might be similar to how you might try to optimize a model for, say, minimizing the cost of a car, but you want to make sure the car has 4 wheels and a steering wheel. So you might minimize the production cost while adding penalty terms for designs that have 3 or 5 wheels, etc.
But again I really want to emphasize that I don't know this field and I don't know what I'm talking about here. I'm just taking a stab.
>I honestly have no idea at all what the OP has found or what it means, but it doesnt seem that surprising that modifying the latent results in global changes in the output.
It only happens in one specific spot: https://i.imgur.com/8DSJYPP.png and https://i.imgur.com/WJsWG78.png. The fact that a single spot in the latent has such a huge impact on the whole image is not a good thing, because the diffusion model will treat that area as equal to the rest of the latent, without giving it more importance. The loss of the diffusion model is applied at the latent level, not the pixel level, so that you don't have to propagate the gradient of the VAE decoder during the training of the diffusion model, so it's unaware of the importance of that spot in the resulting image.
Not arguing that; I'm just saying I don't know that KL divergence does or is responsible for this, and I haven't seen any compelling argument that increasing the KL term would fix it.
There's no question the OP found a legit issue. The questions are more like:
The author might be right though what I've noticed with DL models is that the theory is often leading to underwhelming results after training and "bugs" in models sometimes lead to much better real-world performance, pointing out some disconnect between theory and what gradient-based optimization can achieve. One could see it also in the deep reinforcement learning where in theory the model should converge due to being Markovian via Banach fixed point but in practice the monstrous neural networks that estimate rewards can override this and change the character of the convergence.
One interesting example is how the OG algorithm for solving diff equations, the venerable and almost trivial Euler's method, in fact works very well with SD compared to many much newer, slower and fancier solvers. This likely has to do with the fact that we're dealing with an optimization problem rather than actually trying to find solutions to the diffusion DE.
Stable diffusion (along with other text to image models like Dall-E) use a process called 'latent diffusion'.
At the core of a latent diffusion model is a de-noising process. It takes a noisy image and predicts what is noise vs what is the real image without noise. You use this to remove a bit of noise from the image and repeat to iteratively denoise an image.
You can use this to generate entirely new images by just starting with complete random noise and denoising til you get a 'proper' image. Obviously this would not give you any control over what you generated. So you incorporate 'guidance' which controls how the denoise works. For stable diffusion this guidance comes from a different neural network called CLIP (https://openai.com/research/clip) which can take some text and produce a numerical representation of it that can be correlated to an image of what the text describes (I won't go into more detail here as it's not really relevant to the VAE).
The problem you have with the denoising process is the larger the image you want to denoise the bigger the model you need, and even at a modest 512x512 (the native resolution of stable diffusion) training the model is far too expensive.
This is where the latent bit comes in. Rather than train your model on a 512x512x3 representation (3 channels R,G,B per pixel) use a compressed representation that is 64x64x4, significantly smaller than the uncompressed image and thus requiring a significantly smaller denoising model. This 64x64x4 representation is known as the 'latent' and it is said to be in a 'latent space'.
How do we produce the latent representation? A VAE, a variational autoencoder, yet another neural network. You train an encoder and decoder together to encode an image to the 64x64x4 space and decode it back to 512x512x3 with as little loss as possible.
The issue pointed out here is the VAE for stable diffusion has a flaw, it seems to put global information in a particular point of the image (to a crude approximation it might store information like 'green is the dominant colour of this image' in that point). So if you touch that point in the latent you effect the entire image.
This is bad because the denoising network is constructed in such a way that it expects that points close in the latent only effect other points close in the latent. When that's not the case it ends up 'wasting' a bunch of the network on extracting that global data from that point and fanning it out to the rest of the image (as the entire image needs to know it to denoise correctly).
So without this flaw it may be the stable diffusion denoising model could be more effective as it doesn't need to work hard to work around the flaw.
Edit: Pressed enter too early, post is now complete.
I'm not sure why 4 was chosen (maybe just because it's a power of two?) but a while ago a SD user found that RGB can be approximated fairly well with a simple linear combination of the latents: https://discuss.huggingface.co/t/decoding-latents-to-rgb-wit...
Why does denoising require global information? Shouldn't it be mostly local? I would expect individual pixels to have very little global information and a lot of information from neighboring pixels, and nothing of a local scale from other areas of the image. Isn't this the case?
These people talk like high school kids with too much time on their hands to be honest. Have we created a whole new class of practitioners hacking away with no theory background?
If the latent space is meant to be highly spatially correlated, could you simply apply random rotations of rows and columns† to the latent space throughout the process? That way, there wouldn't be specific areas data could be smuggled through.
† As in, move a random vertical stripe of the image from the right to the left, and a random horizontal portion from the top to the bottom. Or, if that introduces unacceptable edge effects, simply slice the space into 4 randomly sized spaces (although that might encourage smuggling in all of the corners at once.)
If one ever tried to make edits to the latents prior to decoding them with a VAE in SD1.5 and then in SDXL, it could be seen that that local changes had somewhat unpredictable and global effects on the image in SD1.5, while in SDXL the changes have more predictable impacts to the output image and some of the different latent channels end up corresponding more directly to the resulting image channels.
Definitely a fascinating write-up. I have been curious about these differences for a while, though I had never considered this a "problem" per se.
I've once seen someone on Twitter wondering about to-them-obviously-bug with VAE leading to oddly saturated images in anime space, just my dumb brain keyword search though
{kind=link}
{kind=link}
{kind=link}
{kind=link}
A few I’ve seen are:
- The goal should be to have latent outputs as closely resemble gaussian distributed terms between -1 and 1 with a variance of 1, but the outputs are unbounded (you could easily clamp or apply tanh to force them to be between -1 and 1), and the KL loss weight is too low, hence why the latents are weighed by a magic number to more closely fit the -1 to 1 range before being invested by the diffusion model.
- To decrease the computational load of the diffusion model, you should reduce the spatial dimensions of the input - having a low number of channels is irrelevant. The SD VAE turns each 8x8x3 block into a 1x1x4 block when it could be turning it into a 1x1x8 (or even higher) block and preserve much more detail at basically 0 computational cost, since the first operation the diffusion model does is apply a convolution to greatly increase the number of channels.
- The discriminator is based on a tiny PatchGAN, which is an ancient model by modern standards. You can have much better results by applying some of the GAN research of the last few years, or of course using a diffusion decoder which is then distilled either with consistency or adversarial distillation.
- KL divergence in general is not even the most optimal way to achieve the goals of a latent diffusion model’s VAE, which is to decrease the spatial dimensions of the input images and have a latent space that’s robust to noise and local perturbations. I’ve had better results with a vanilla AE, clamping the outputs, having a variance loss term and applying various perturbations to the latents before they are ingested by the decoder.